Background
In the very first post, we talked about the KCOV and when we looked up the source code of syzkaller we found some functions related to “remote” KCOV. In this post, I will briefly introduce what it is, and how syzkaller adopts it in external USB fuzzing.
Remote KCOV 101
At early days, part of the definition of KCOV is presented below
Note that kcov does not aim to collect as much coverage as possible. It aims to collect more or less stable coverage that is function of syscall inputs. To achieve this goal it does not collect coverage in soft/hard interrupts and instrumentation of some inherently non-deterministic parts of kernel is disabled (e.g. scheduler, locking).
That is to say, KCOV selectively collect coverage from dedicated code regions. In another word, the KCOV-based fuzzer can miss the guide when entering into code like soft/hard interrupts.
Back to our first post, you can see that __sanitizer_cov_trace_pc collects coverage for current process, and during the fuzzing loop, this process will interact with /sys/kernel/debug/kcov to obtain the coverage. However, in the kernel space, many tasks (above interrupt for example) are handled by a background thread, which does not have essentially user space context.
This kinda problem will not bother a vanilla system call fuzzer. However, if a security researcher wants to fuzz some other interesting subsystems of the kernel, it indeed leaves a challenge.
To solve this, an extra patch is added, named remote KCOV, by syzkaller to fuzz the external USB system (will discuss this later on). The basic of idea is allowing the developer to add dedicated coverage-collect-start mark and coverage-collect-end mark. With these marks, the KCOV can be reminded to collect coverage for the background thread and strore the coverage information for the mark specified region. Later on, the user space program can interact with the /sys/kernel/debug/kcov and get the collected coverage using special handle.
We will look up the source code to understand this. Below comment is quite clearly to form a basic understanding.
/*
* kcov_remote_start() and kcov_remote_stop() can be used to annotate a section
* of code in a kernel background thread or in a softirq to allow kcov to be
* used to collect coverage from that part of code.
*
* The handle argument of kcov_remote_start() identifies a code section that is
* used for coverage collection. A userspace process passes this handle to
* KCOV_REMOTE_ENABLE ioctl to make the used kcov device start collecting
* coverage for the code section identified by this handle.
*
* The usage of these annotations in the kernel code is different depending on
* the type of the kernel thread whose code is being annotated.
*
* For global kernel threads that are spawned in a limited number of instances
* (e.g. one USB hub_event() worker thread is spawned per USB HCD) and for
* softirqs, each instance must be assigned a unique 4-byte instance id. The
* instance id is then combined with a 1-byte subsystem id to get a handle via
* kcov_remote_handle(subsystem_id, instance_id).
*
* For local kernel threads that are spawned from system calls handler when a
* user interacts with some kernel interface (e.g. vhost workers), a handle is
* passed from a userspace process as the common_handle field of the
* kcov_remote_arg struct (note, that the user must generate a handle by using
* kcov_remote_handle() with KCOV_SUBSYSTEM_COMMON as the subsystem id and an
* arbitrary 4-byte non-zero number as the instance id). This common handle
* then gets saved into the task_struct of the process that issued the
* KCOV_REMOTE_ENABLE ioctl. When this process issues system calls that spawn
* kernel threads, the common handle must be retrieved via kcov_common_handle()
* and passed to the spawned threads via custom annotations. Those kernel
* threads must in turn be annotated with kcov_remote_start(common_handle) and
* kcov_remote_stop(). All of the threads that are spawned by the same process
* obtain the same handle, hence the name "common".
*
* See Documentation/dev-tools/kcov.rst for more details.
*
* Internally, kcov_remote_start() looks up the kcov device associated with the
* provided handle, allocates an area for coverage collection, and saves the
* pointers to kcov and area into the current task_struct to allow coverage to
* be collected via __sanitizer_cov_trace_pc().
* In turns kcov_remote_stop() clears those pointers from task_struct to stop
* collecting coverage and copies all collected coverage into the kcov area.
*/
Pretty explanatory comment huh? In addition, the content of Documentation/dev-tools/kcov.rst can also help.
This allows to collect coverage from two types of kernel background threads: the global ones, that are spawned during kernel boot in a limited number of instances (e.g. one USB hub_event() worker thread is spawned per USB HCD); and the local ones, that are spawned when a user interacts with some kernel interface (e.g. vhost workers).
Okay, talk is cheap and you may want to see some code example (from the Documentation).
int main(int argc, char **argv)
{
int fd;
unsigned long *cover, n, i;
struct kcov_remote_arg *arg;
fd = open("/sys/kernel/debug/kcov", O_RDWR);
if (fd == -1)
perror("open"), exit(1);
if (ioctl(fd, KCOV_INIT_TRACE, COVER_SIZE))
perror("ioctl"), exit(1);
cover = (unsigned long*)mmap(NULL, COVER_SIZE * sizeof(unsigned long),
PROT_READ | PROT_WRITE, MAP_SHARED, fd, 0);
if ((void*)cover == MAP_FAILED)
perror("mmap"), exit(1);
Until here, everything seems the same. You need to open the KCOV file, init the trace and map a share buffer. The difference is presented in following code.
/* Enable coverage collection via common handle and from USB bus #1. */
arg = calloc(1, sizeof(*arg) + sizeof(uint64_t)); // -- +sizeof(uint64_t) means one handler in array
if (!arg)
perror("calloc"), exit(1);
arg->trace_mode = KCOV_TRACE_PC;
arg->area_size = COVER_SIZE;
arg->num_handles = 1;
arg->common_handle = kcov_remote_handle(KCOV_SUBSYSTEM_COMMON,
KCOV_COMMON_ID); // register a common handle
arg->handles[0] = `kcov_remote_handle`(KCOV_SUBSYSTEM_USB,
KCOV_USB_BUS_NUM); // register a remote handle
if (ioctl(fd, KCOV_REMOTE_ENABLE, arg))
perror("ioctl"), free(arg), exit(1);
free(arg);
This code snippet shows us how to prepare remote kcov_remote_arg arguments.
struct kcov_remote_arg {
__u32 trace_mode;
__u32 area_size;
__u32 num_handles;
__aligned_u64 common_handle; // common handle for local case;
__aligned_u64 handles[0]; // remote handle for global case; dynamic array here
};
Here, the KCOV_COMMON_ID and KCOV_USB_BUS_NUM are prepared by the user himself while KCOV_SUBSYSTEM_COMMON and KCOV_SUBSYSTEM_USB are prepared by the KCOV. The kcov_remote_handle just splice them into one u64 variable.
// include/uapi/linux/kcov.h
#define KCOV_SUBSYSTEM_COMMON (0x00ull << 56)
#define KCOV_SUBSYSTEM_USB (0x01ull << 56)
#define KCOV_SUBSYSTEM_MASK (0xffull << 56)
#define KCOV_INSTANCE_MASK (0xffffffffull)
static inline __u64 kcov_remote_handle(__u64 subsys, __u64 inst)
{
if (subsys & ~KCOV_SUBSYSTEM_MASK || inst & ~KCOV_INSTANCE_MASK) // -- subsystem | instance
return 0;
return subsys | inst;
}
At least we know that we have to define new subsys variable if we want to fuzz other part of code.
We continually look at this example code.
/*
* Here the user needs to trigger execution of a kernel code section
* that is either annotated with the common handle, or to trigger some
* activity on USB bus #1.
*/
sleep(2);
This example doesn’t offer us any “trigger” code. Maybe this is the charming part of external fuzzing.
n = __atomic_load_n(&cover[0], __ATOMIC_RELAXED);
for (i = 0; i < n; i++)
printf("0x%lx\n", cover[i + 1]);
if (ioctl(fd, KCOV_DISABLE, 0))
perror("ioctl"), exit(1);
if (munmap(cover, COVER_SIZE * sizeof(unsigned long)))
perror("munmap"), exit(1);
if (close(fd))
perror("close"), exit(1);
return 0;
}
The last part of the example is also very alike to the standard KCOV: read the shared buffer, use ioctl to disable the collection, and unmap the buffer, blabla.
After we take this peek at how userspace code works with the remote KCOV, let’s see how kernel cooperate with this.
static long kcov_ioctl(struct file *filep, unsigned int cmd, unsigned long arg)
{
struct kcov *kcov;
int res;
struct kcov_remote_arg *remote_arg = NULL;
unsigned int remote_num_handles;
unsigned long remote_arg_size;
unsigned long flags;
if (cmd == KCOV_REMOTE_ENABLE) { // special one
if (get_user(remote_num_handles, (unsigned __user *)(arg +
offsetof(struct kcov_remote_arg, num_handles))))
return -EFAULT;
if (remote_num_handles > KCOV_REMOTE_MAX_HANDLES)
return -EINVAL;
remote_arg_size = struct_size(remote_arg, handles,
remote_num_handles);
remote_arg = memdup_user((void __user *)arg, remote_arg_size);
if (IS_ERR(remote_arg))
return PTR_ERR(remote_arg);
if (remote_arg->num_handles != remote_num_handles) {
kfree(remote_arg);
return -EINVAL;
}
arg = (unsigned long)remote_arg; // -- For normal `KCOV_ENABLE`, arg can just be 0
}
kcov = filep->private_data;
spin_lock_irqsave(&kcov->lock, flags);
res = kcov_ioctl_locked(kcov, cmd, arg); // -- To next level
spin_unlock_irqrestore(&kcov->lock, flags);
kfree(remote_arg);
return res;
}
Attenion, for normal KCOV_ENABLE, no special arguments are required. But for the KCOV_REMOTE_ENABLE part, some code of argument retrieving is essential.
static int kcov_ioctl_locked(struct kcov *kcov, unsigned int cmd,
unsigned long arg)
{
struct task_struct *t;
unsigned long size, unused;
int mode, i;
struct kcov_remote_arg *remote_arg;
struct kcov_remote *remote;
unsigned long flags;
switch (cmd) {
/* ... */
case KCOV_REMOTE_ENABLE:
if (kcov->mode != KCOV_MODE_INIT || !kcov->area)
return -EINVAL;
t = current;
if (kcov->t != NULL || t->kcov != NULL)
return -EBUSY;
remote_arg = (struct kcov_remote_arg *)arg;
mode = kcov_get_mode(remote_arg->trace_mode);
if (mode < 0)
return mode;
if (remote_arg->area_size > LONG_MAX / sizeof(unsigned long))
return -EINVAL;
kcov->mode = mode;
t->kcov = kcov;
kcov->t = t;
kcov->remote = true;
kcov->remote_size = remote_arg->area_size;
spin_lock_irqsave(&kcov_remote_lock, flags);
for (i = 0; i < remote_arg->num_handles; i++) {
if (!kcov_check_handle(remote_arg->handles[i],
false, true, false)) {
spin_unlock_irqrestore(&kcov_remote_lock,
flags);
kcov_disable(t, kcov);
return -EINVAL;
}
remote = kcov_remote_add(kcov, remote_arg->handles[i]);
if (IS_ERR(remote)) {
spin_unlock_irqrestore(&kcov_remote_lock,
flags);
kcov_disable(t, kcov);
return PTR_ERR(remote);
}
}
if (remote_arg->common_handle) {
if (!kcov_check_handle(remote_arg->common_handle,
true, false, false)) {
spin_unlock_irqrestore(&kcov_remote_lock,
flags);
kcov_disable(t, kcov);
return -EINVAL;
}
remote = kcov_remote_add(kcov,
remote_arg->common_handle);
if (IS_ERR(remote)) {
spin_unlock_irqrestore(&kcov_remote_lock,
flags);
kcov_disable(t, kcov);
return PTR_ERR(remote);
}
t->kcov_handle = remote_arg->common_handle;
}
spin_unlock_irqrestore(&kcov_remote_lock, flags);
/* Put either in kcov_task_exit() or in KCOV_DISABLE. */
kcov_get(kcov);
return 0;
default:
return -ENOTTY;
}
}
The kcov_ioctl_locked is going to add the coverage collection handler for global threads and local threads.
For both of them
- assign trace mode (PC or CMP)
- assign
kcovmanager struct to thetask_struct - some essential arguments like
area_size - do
kcov_check_handle - call
kcov_remote_add
For local background thread only
- update
task_struct->kcov_handlewith input arguement
We keep going~
/*
* kcov descriptor (one per opened debugfs file).
* State transitions of the descriptor:
* - initial state after open()
* - then there must be a single ioctl(KCOV_INIT_TRACE) call
* - then, mmap() call (several calls are allowed but not useful)
* - then, ioctl(KCOV_ENABLE, arg), where arg is
* KCOV_TRACE_PC - to trace only the PCs
* or
* KCOV_TRACE_CMP - to trace only the comparison operands
* - then, ioctl(KCOV_DISABLE) to disable the task.
* Enabling/disabling ioctls can be repeated (only one task a time allowed).
*/
struct kcov {
/*
* Reference counter. We keep one for:
* - opened file descriptor
* - task with enabled coverage (we can't unwire it from another task)
* - each code section for remote coverage collection
*/
refcount_t refcount;
/* The lock protects mode, size, area and t. */
spinlock_t lock;
enum kcov_mode mode;
/* Size of arena (in long's). */
unsigned int size;
/* Coverage buffer shared with user space. */
void *area;
/* Task for which we collect coverage, or NULL. */
struct task_struct *t;
/* Collecting coverage from remote (background) threads. */
bool remote;
/* Size of remote area (in long's). */
unsigned int remote_size;
/*
* Sequence is incremented each time kcov is reenabled, used by
* kcov_remote_stop(), see the comment there.
*/
int sequence;
};
struct kcov_remote_area {
struct list_head list;
unsigned int size;
};
struct kcov_remote {
u64 handle;
struct kcov *kcov;
struct hlist_node hnode;
};
// ...
/* Must be called with kcov_remote_lock locked. */
static struct kcov_remote *kcov_remote_add(struct kcov *kcov, u64 handle)
{
struct kcov_remote *remote;
if (kcov_remote_find(handle))
return ERR_PTR(-EEXIST);
remote = kmalloc(sizeof(*remote), GFP_ATOMIC);
if (!remote)
return ERR_PTR(-ENOMEM);
remote->handle = handle;
remote->kcov = kcov;
hash_add(kcov_remote_map, &remote->hnode, handle);
return remote;
}
To add this reomte one, kcov_remote will be allocated and added to hash list. The most important candidate of this struct is remote->handle.
Cool, so far we are seemed to finish the very first job. We will then see how the special marks kcov_remote_start()/kcov_remote_stop() work.
void kcov_remote_start(u64 handle)
{
struct task_struct *t = current;
struct kcov_remote *remote;
struct kcov *kcov;
unsigned int mode;
void *area;
unsigned int size;
int sequence;
unsigned long flags;
if (WARN_ON(!kcov_check_handle(handle, true, true, true)))
return;
if (!in_task() && !in_serving_softirq())
return;
local_irq_save(flags);
/*
* Check that kcov_remote_start() is not called twice in background
* threads nor called by user tasks (with enabled kcov).
*/
mode = READ_ONCE(t->kcov_mode);
if (WARN_ON(in_task() && kcov_mode_enabled(mode))) {
local_irq_restore(flags);
return;
}
/*
* Check that kcov_remote_start() is not called twice in softirqs.
* Note, that kcov_remote_start() can be called from a softirq that
* happened while collecting coverage from a background thread.
*/
if (WARN_ON(in_serving_softirq() && t->kcov_softirq)) {
local_irq_restore(flags);
return;
}
spin_lock(&kcov_remote_lock);
remote = kcov_remote_find(handle);
if (!remote) {
spin_unlock_irqrestore(&kcov_remote_lock, flags);
return;
}
kcov_debug("handle = %llx, context: %s\n", handle,
in_task() ? "task" : "softirq");
kcov = remote->kcov;
/* Put in kcov_remote_stop(). */
kcov_get(kcov);
/*
* Read kcov fields before unlock to prevent races with
* KCOV_DISABLE / kcov_remote_reset().
*/
mode = kcov->mode;
sequence = kcov->sequence;
if (in_task()) {
size = kcov->remote_size;
area = kcov_remote_area_get(size);
} else {
size = CONFIG_KCOV_IRQ_AREA_SIZE;
area = this_cpu_ptr(&kcov_percpu_data)->irq_area;
}
spin_unlock_irqrestore(&kcov_remote_lock, flags);
/* Can only happen when in_task(). */
if (!area) {
area = vmalloc(size * sizeof(unsigned long));
if (!area) {
kcov_put(kcov);
return;
}
}
local_irq_save(flags);
/* Reset coverage size. */
*(u64 *)area = 0;
if (in_serving_softirq()) {
kcov_remote_softirq_start(t);
t->kcov_softirq = 1;
}
kcov_start(t, kcov, size, area, mode, sequence);
local_irq_restore(flags);
}
EXPORT_SYMBOL(kcov_remote_start);
/* ... */
static inline void kcov_remote_start_common(u64 id)
{
kcov_remote_start(kcov_remote_handle(KCOV_SUBSYSTEM_COMMON, id));
}
static inline void kcov_remote_start_usb(u64 id)
{
kcov_remote_start(kcov_remote_handle(KCOV_SUBSYSTEM_USB, id));
}
What a complex function, the kcov_remote_start() will do some basic checking at first. After that, it will use kcov_remote_find() to find the essential kcov_remote struct, which is added by the above KCOV_REMOTE_ENABLE command. If this ioctl is not done yet, the kcov_remote_start() will return with nothing. Else, it keeps going, retriving the memory area for storing coverage.
Once the area is obtained, the biggest challenge is solved. As introduced above, we know that the vanilla KCOV cannot collect coverage for background thread because it does not have user process context hence it cannot find the dedicated memory buffer mapped by the userspace ioctl.
However, the remote KCOV helps the background thread find the buffer by initiatively calling kcov_remote_start() with handle. The handle here will help to find the memory buffer the user allocated.
Cool, assuming we have found the area that user can parse. What about next? How the coverage is collected and managed? I draw a graph to demonstrate the relation between different data structures.
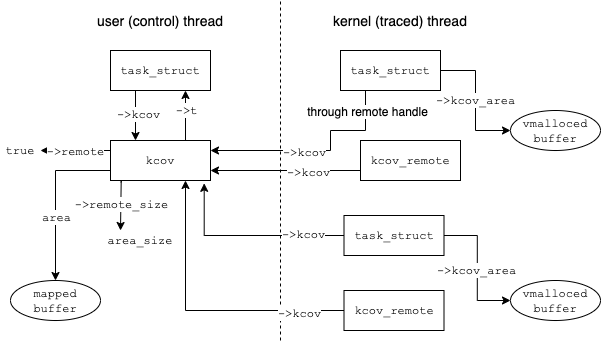
In a nutshell, the being traced background thread, once calling kcov_remote_start, will use the handle to find the kcov_remote struct and get the kcov struct. It will be attached to the task_struct and a new memory buffer will be created by vmalloc to store coverage information.
However, you may wonder another question: if the background thread stores the coverage in its own buffer, how can user thread access and parse it? Let’s take a look at stop function.
/* See the comment before kcov_remote_start() for usage details. */
void kcov_remote_stop(void)
{
struct task_struct *t = current;
struct kcov *kcov;
unsigned int mode;
void *area;
unsigned int size;
int sequence;
unsigned long flags;
if (!in_task() && !in_serving_softirq())
return;
local_irq_save(flags);
mode = READ_ONCE(t->kcov_mode);
barrier();
if (!kcov_mode_enabled(mode)) {
local_irq_restore(flags);
return;
}
/*
* When in softirq, check if the corresponding kcov_remote_start()
* actually found the remote handle and started collecting coverage.
*/
if (in_serving_softirq() && !t->kcov_softirq) {
local_irq_restore(flags);
return;
}
/* Make sure that kcov_softirq is only set when in softirq. */
if (WARN_ON(!in_serving_softirq() && t->kcov_softirq)) {
local_irq_restore(flags);
return;
}
kcov = t->kcov;
area = t->kcov_area;
size = t->kcov_size;
sequence = t->kcov_sequence;
kcov_stop(t); // -- [1] It will call `kcov_stop` first
if (in_serving_softirq()) {
t->kcov_softirq = 0;
kcov_remote_softirq_stop(t);
}
spin_lock(&kcov->lock);
/*
* KCOV_DISABLE could have been called between kcov_remote_start()
* and kcov_remote_stop(), hence the sequence check.
*/
if (sequence == kcov->sequence && kcov->remote)
kcov_move_area(kcov->mode, kcov->area, kcov->size, area); // -- [2] An new function will be called
spin_unlock(&kcov->lock);
if (in_task()) {
spin_lock(&kcov_remote_lock);
kcov_remote_area_put(area, size);
spin_unlock(&kcov_remote_lock);
}
local_irq_restore(flags);
/* Get in kcov_remote_start(). */
kcov_put(kcov);
}
EXPORT_SYMBOL(kcov_remote_stop);
We can see that this kcov_remote_stop() function will first call standard kcov_stop to stop the coverage collection.
static void kcov_stop(struct task_struct *t)
{
WRITE_ONCE(t->kcov_mode, KCOV_MODE_DISABLED);
barrier();
t->kcov = NULL;
t->kcov_size = 0;
t->kcov_area = NULL;
}
In addition, it further calls kcov_move_area(), which is responsible for “copying” the collected coverage to user mapped memory.
static void kcov_move_area(enum kcov_mode mode, void *dst_area,
unsigned int dst_area_size, void *src_area)
{
u64 word_size = sizeof(unsigned long);
u64 count_size, entry_size_log;
u64 dst_len, src_len;
void *dst_entries, *src_entries;
u64 dst_occupied, dst_free, bytes_to_move, entries_moved;
kcov_debug("%px %u <= %px %lu\n",
dst_area, dst_area_size, src_area, *(unsigned long *)src_area);
switch (mode) {
case KCOV_MODE_TRACE_PC:
dst_len = READ_ONCE(*(unsigned long *)dst_area);
src_len = *(unsigned long *)src_area;
count_size = sizeof(unsigned long);
entry_size_log = __ilog2_u64(sizeof(unsigned long));
break;
case KCOV_MODE_TRACE_CMP:
dst_len = READ_ONCE(*(u64 *)dst_area);
src_len = *(u64 *)src_area;
count_size = sizeof(u64);
BUILD_BUG_ON(!is_power_of_2(KCOV_WORDS_PER_CMP));
entry_size_log = __ilog2_u64(sizeof(u64) * KCOV_WORDS_PER_CMP);
break;
default:
WARN_ON(1);
return;
}
/* As arm can't divide u64 integers use log of entry size. */
if (dst_len > ((dst_area_size * word_size - count_size) >>
entry_size_log))
return;
dst_occupied = count_size + (dst_len << entry_size_log);
dst_free = dst_area_size * word_size - dst_occupied;
bytes_to_move = min(dst_free, src_len << entry_size_log);
dst_entries = dst_area + dst_occupied;
src_entries = src_area + count_size;
memcpy(dst_entries, src_entries, bytes_to_move);
entries_moved = bytes_to_move >> entry_size_log;
switch (mode) {
case KCOV_MODE_TRACE_PC:
WRITE_ONCE(*(unsigned long *)dst_area, dst_len + entries_moved);
break;
case KCOV_MODE_TRACE_CMP:
WRITE_ONCE(*(u64 *)dst_area, dst_len + entries_moved);
break;
default:
break;
}
}
Though this function is a little nagging, it just does a simple job, as demonstrated in the below figure.

Once the kcov_area_move() is finished, the userspace coverage parising can start. Because this function is protected by kcov->lock, multiple handles can cooperate and merge their collected coverage one by one.
One more thing, when calling kcov_remote_start(), the vmalloc is not necessarily called. In fact, for in_task() cases, the KCOV may use kcov_remote_areas list to cache the buffer for optimization. While for in_serving_softirq() cases, the buffer is created in kcov_init() function at very early time.
I don’t quite clear about the difference between
in_task()andin_serving_softirq()under remote coverage scenario. It won’t bother a lot, the answer may be revealed in the following content, or not. :)
syzkaller external USB fuzzing
In 2017, the syzkaller team started porting this fantastic tool into external USB fuzzing. The most important building block is the remote KCOV we just discussed. Next, we are going to figure out how syzkaller adopts the remote KCOV in its guided fuzzing.
Kernel Side
As the remote KCOV now is already merged in the mainline kernel. We can search and find where the kcov_remote_start is placed.
USB
static void hub_event(struct work_struct *work)
{
struct usb_device *hdev;
struct usb_interface *intf;
struct usb_hub *hub;
struct device *hub_dev;
u16 hubstatus;
u16 hubchange;
int i, ret;
hub = container_of(work, struct usb_hub, events);
hdev = hub->hdev;
hub_dev = hub->intfdev;
intf = to_usb_interface(hub_dev);
kcov_remote_start_usb((u64)hdev->bus->busnum);
/* ..... */
kcov_remote_stop();
}
vhost
static int vhost_worker(void *data)
{
struct vhost_dev *dev = data;
struct vhost_work *work, *work_next;
struct llist_node *node;
kthread_use_mm(dev->mm);
for (;;) {
/* ..... */
llist_for_each_entry_safe(work, work_next, node, node) {
clear_bit(VHOST_WORK_QUEUED, &work->flags);
__set_current_state(TASK_RUNNING);
kcov_remote_start_common(dev->kcov_handle);
work->fn(work);
kcov_remote_stop();
if (need_resched())
schedule();
}
}
kthread_unuse_mm(dev->mm);
return 0;
}
Okay, what we can find out is that kcov_remote_start_common()/kcov_remote_start_usb() are paired with kcov_remote_stop(). However, as we don’t clear about the function of hub_event and vhost_worker. We cannot tell much difference here.
If you do some backtrace analysis, you can find the
hub_eventis called as workqueue:INIT_WORK(&hub->events, hub_event);. Hence it is always waked by interrupts. (global cases) while thevhost_workesis called withinvhost_dev_ioctl() -> vhost_dev_set_owner() -> kthread_create(). Hence it is waked by system calls (local cases)
We will see how syzkaller operates these.
Fuzzing Side
In the first post of this series, we know how syz-fuzzer collectes the coverage. We now back to the old function cover_enable().
static void cover_enable(cover_t* cov, bool collect_comps, bool extra)
{
unsigned int kcov_mode = collect_comps ? KCOV_TRACE_CMP : KCOV_TRACE_PC;
// The KCOV_ENABLE call should be fatal,
// but in practice ioctl fails with assorted errors (9, 14, 25),
// so we use exitf.
if (!extra) {
if (ioctl(cov->fd, KCOV_ENABLE, kcov_mode))
exitf("cover enable write trace failed, mode=%d", kcov_mode);
return;
}
kcov_remote_arg<1> arg = {
.trace_mode = kcov_mode,
// Coverage buffer size of background threads.
.area_size = kExtraCoverSize,
.num_handles = 1,
};
arg.common_handle = kcov_remote_handle(KCOV_SUBSYSTEM_COMMON, procid + 1);
arg.handles[0] = kcov_remote_handle(KCOV_SUBSYSTEM_USB, procid + 1);
if (ioctl(cov->fd, KCOV_REMOTE_ENABLE, &arg))
exitf("remote cover enable write trace failed");
}
As you can see, before the KCOV_REMOTE_ENABLE is called, syzkaller just simply prepare arguments. The num_handles is set to 1 as only the USB subsystem is concerned. The instance variable is set to procid + 1 to distinguish between each other.
We then take a look at the descriptions. In fact, the syzkaller defines 6 USB pseudo-syscalls (see syzlang descriptions and pseudo-syscalls. These syscalls are summarized in the documentations and presented below
syz_usb_connect- connects a USB device. Handles all requests to the control endpoint until aSET_CONFIGURATIONrequest is received.syz_usb_connect_ath9k- connects anath9kUSB device. Compared tosyz_usb_connect, this syscall also handles firmware download requests that happen afterSET_CONFIGURATIONfor theath9kdriver.syz_usb_disconnect- disconnects a USB device.syz_usb_control_io- sends or receives a control message over endpoint 0.syz_usb_ep_write- sends a message to a non-control endpoint.syz_usb_ep_read- receives a message from a non-control endpoint.
We may not so clear with the USB and relevant operations, but we can see that these pseudo-system calls are organized as multiple interactions. (the connect itself can have many steps and stages)
The coverage collected part is almost the same with standard one so no more words here. Until now we know how remote KCOV integrates normal KCOV. We will try some demo then.
Demo
One of my favorite syzkaller demo is presented by Jinbum. This time, we will make a little change to transfer it to a remote one.
Check about this: https://github.com/f0rm2l1n/kfuzz.git
The output I get are
0xffffffffc000010e => linux-5.8.15/./include/linux/uaccess.h:144
0xffffffff81dfccd1 => linux-5.8.15/lib/usercopy.c:13
0xffffffff81dfcd1c => linux-5.8.15/lib/usercopy.c:13
0xffffffff81dfcd31 => linux-5.8.15/./include/linux/instrumented.h:105
0xffffffff81dfcd50 => linux-5.8.15/lib/usercopy.c:17
0xffffffff81dfcd64 => linux-5.8.15/lib/usercopy.c:20
0xffffffffc0000121 => kcov-remote-example/lkm/remote_lkm.c:39
And these match the prediction of mine. (checking, copy_from_user, and some part code of the driver). Hope this example show you how to use the remote kcov.
Conclusion
This time, we take a trip to look through how remote KCOV is used to trace the background thread. In a nutshell, global thread (dedicated subsystem handle) and local thread (common handle) are the targets. We also see how syzkaller adopts the remote KCOV in its guided fuzzing. (In fact, you can easily set up the environment and run it. HINT: using the upstream-usb.config) At last, a dummy demo is provided to help you use the remote KCOV to collect coverage from the kernel module. \
Of course, we haven’t ported the syzkaller to fuzzing the example driver. To be honest, I don’t figure the best way to do this. Is it enough if we just write some system call descriptions (as we use the common handle)? We will know the answer in the future maybe.